![]()
-
超快激光加工與微納制造
-
光場調(diào)控、傳輸及應(yīng)用
-
激光探測與空間光通信
![]()
System Configuration
基于空間光調(diào)制器的飛秒激光誘導(dǎo)雙光子聚合加工系統(tǒng)
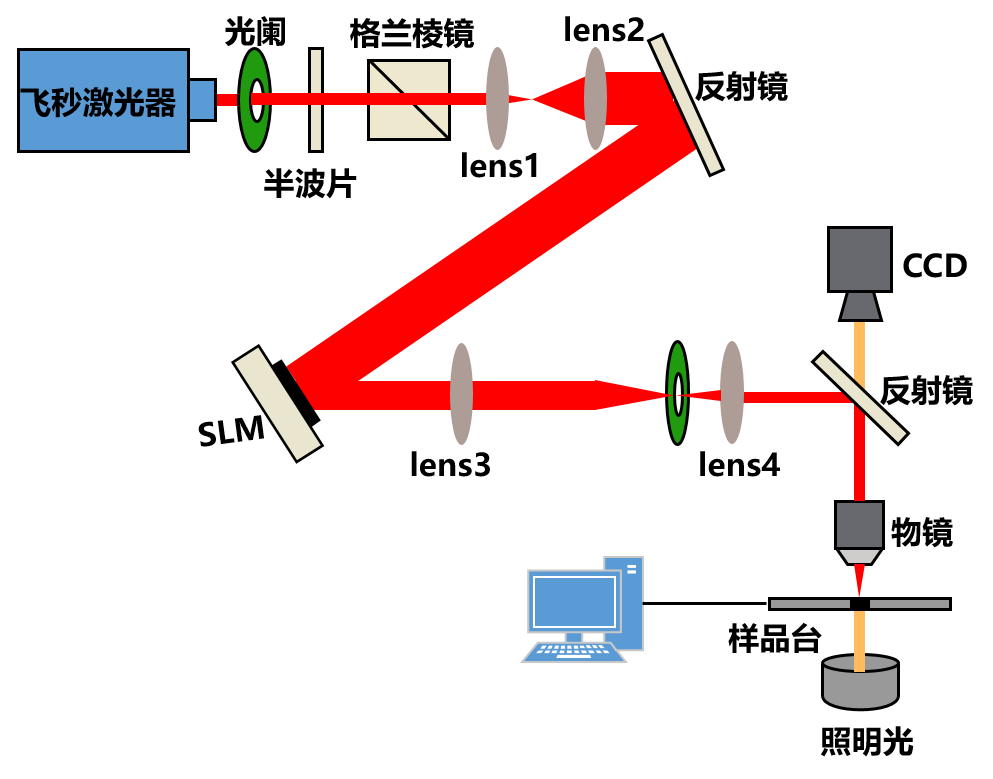
實(shí)驗(yàn)系統(tǒng)配置
| 激光源 | 飛秒激光器830nm,120fs,78MHz |
| 激光能量控制系統(tǒng) | 光闌,半波片,格蘭棱鏡 |
| 擴(kuò)束系統(tǒng) | 透鏡1,透鏡2 |
| 4f系統(tǒng) | 透鏡3,透鏡4,光闌 |
| 空間整形系統(tǒng) | 反射式空間光調(diào)制器,反射鏡 |
| 聚焦系統(tǒng) | 物鏡,反射鏡 |
| 加工平臺 | 三維納米位移平臺,樣品,照明光源,電腦 |
| 實(shí)時監(jiān)測系統(tǒng) | 電荷耦合器件CCD |
系統(tǒng)原理
激光能量由半波片和格蘭棱鏡控制,通過旋轉(zhuǎn)半波片實(shí)現(xiàn)激光能量控制。光束經(jīng)過由透鏡1和透鏡2組成的擴(kuò)束器、反射鏡后,入射到SLM的液晶面。SLM通過加載閃耀光柵,改變?nèi)肷涔獾南辔环植迹瑢?shí)現(xiàn)光束反射角的調(diào)制。SLM是一個衍射光學(xué)元件,被調(diào)制的光束會產(chǎn)生多個衍射級次,實(shí)驗(yàn)過程中只有+1級調(diào)制光通過光闌,其他衍射級次的光被阻擋在光闌之外。調(diào)制后的光束經(jīng)過透鏡3和透鏡4組成的4f濾波系統(tǒng),最后入射到物鏡進(jìn)行加工。通過加載全息圖,調(diào)制出不同圖案、不同焦點(diǎn)位置的光束,以實(shí)現(xiàn)對目標(biāo)結(jié)構(gòu)的加工。CCD實(shí)時監(jiān)測加工過程。
研究現(xiàn)狀
飛秒激光雙光子傳統(tǒng)加工方法采用單點(diǎn)掃描方式,效率低下,為了進(jìn)一步實(shí)現(xiàn)高效率、高精度和跨尺度激光加工,可以對飛秒激光進(jìn)行空域和時域的相干操控。飛秒激光加工的空間分辨率對焦點(diǎn)處光強(qiáng)的空間分布非常敏感,因此對激光-材料相互作用區(qū)超快光場的精確操控尤為關(guān)鍵。可以利用空間光調(diào)制器調(diào)制入射光場,實(shí)現(xiàn)無掩模圖形化加工,有效解決了雙光子加工效率低下的問題,為飛秒激光并行加工提供了新的模式。吳東課題基于液晶空間光調(diào)制器動態(tài)加載計算全息圖同時控制焦點(diǎn)位置和能量,實(shí)現(xiàn)各種可控環(huán)狀結(jié)構(gòu)的加工。李焱課題組通過拉蓋爾-高斯模式光束的等權(quán)重線性疊加,制備了焦斑形貌為雙螺旋的光束。
潛在應(yīng)用
(1)在新型集成光學(xué)、微納光學(xué)、微流控、光子集成、太赫茲光學(xué)等方向有巨大前景;
(2)利用飛秒激光雙光子聚合加工方法對三維木堆結(jié)構(gòu)進(jìn)行制備,其結(jié)構(gòu)是實(shí)現(xiàn)生物支架、光子晶體、超材料等功能性器件的重要途徑之一。在未來將廣泛應(yīng)用于生物醫(yī)學(xué)中的血管支架以及國防工業(yè)中的雷達(dá)天線、雷達(dá)罩、隱身戰(zhàn)機(jī)等領(lǐng)域;
(3)以雙光子聚合為代表的具有納米精度的激光3D打印技術(shù)在光學(xué)微器件、微機(jī)電系統(tǒng)、生物組織工程等領(lǐng)域?qū)l(fā)揮不可替代的作用;
(4)雙螺旋光束加工有望用于螺旋超材料的快速制備。
聚合雙螺旋微結(jié)構(gòu)
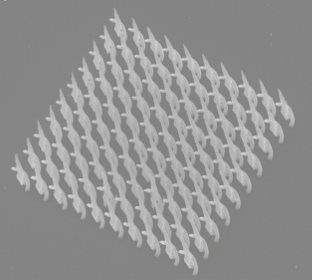
細(xì)胞支架
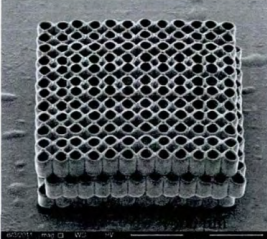
微馬達(dá)
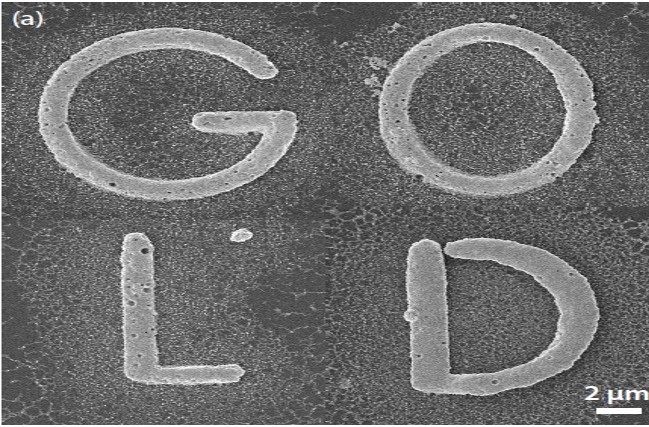
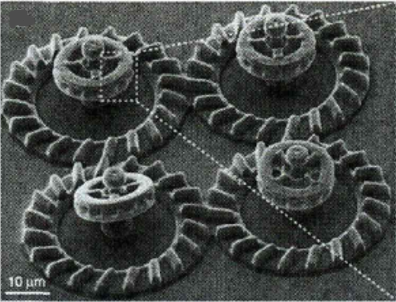
金納米棒/聚合物圖案